11月27日,我校電子信息工程學院(機器人學院)周凌云老師在國際通信領域權威期刊IEEE Transactions on Wireless Communications(TWC)發表重要研究成果,為多無人機協同通信與感知技術突破提供了創新性解決方案。
TWC是IEEE通信學會旗下無線通信領域旗艦期刊,長期穩居中科院一區TOP行列,影響因子達10.7,以其學術含金量和國際影響力被公認為全球無線通信領域頂級學術期刊之一。
論文數據一覽。電信學院供圖
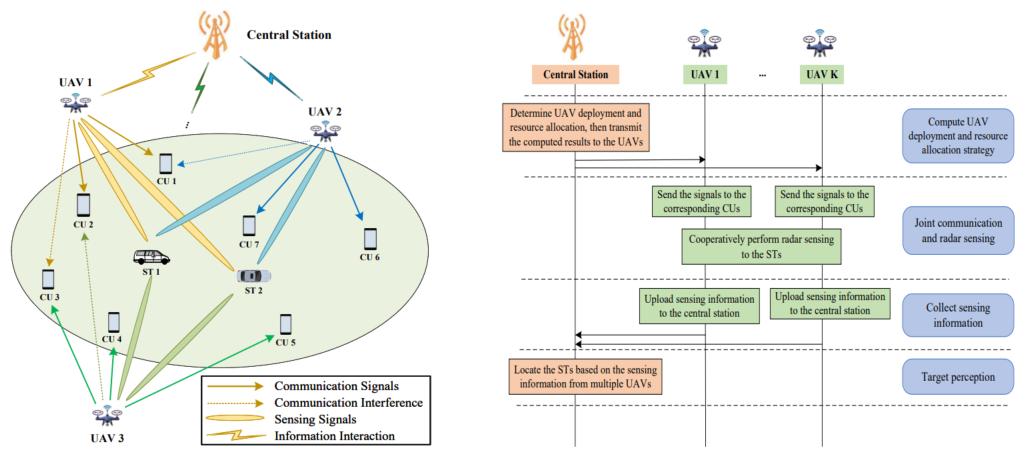
此次發表的論文Joint Deployment and Resource Allocation Design for JRC-Enabled Multi-UAV Cooperative Systems,聚焦多無人機雷達通信一體化(JRC)協同系統的部署與資源分配優化,為提升復雜電磁環境下無人機集群的通信性能與目標定位精度提供了全新技術范式。論文第一作者為周凌云老師,合作作者包括同濟大學史清江教授、魏忠祥副教授及張榮慶副教授。
隨著6G網絡加速發展,多無人機系統在應急通信、智能偵察等領域應用日益廣泛。傳統模式下通信與探測任務分離配置,存在硬件資源浪費、協同效率低下等問題,疊加頻譜資源緊張、協作機制復雜等瓶頸,嚴重制約系統效能提升。雷達通信一體化(JRC)技術通過同一平臺集成通信與雷達任務,可顯著提升頻譜利用率、降低系統成本,為多無人機協同網絡發展開辟新路徑。
目前,多無人機JRC系統中存在通信用戶數據速率與目標定位精度的平衡難題。該問題涉及無人機部署、資源分配、用戶關聯等多維度耦合優化,計算復雜度極高,周凌云老師團隊提出聯合優化框架,將用戶關聯、功率分配、信道選擇與無人機位置等多維度優化問題一體化建模,通過光滑逼近與交替優化策略實現高效求解,大幅提升通信覆蓋與定位精度的協同性能。大量仿真驗證顯示,該方法在通信吞吐量、定位誤差下界(SPEB)及資源利用效率等核心指標上,均顯著優于現有方案。
該成果為構建高效靈活的多無人機協同通信—感知網絡提供了關鍵技術支撐,在未來6G空基網絡、應急救援、智能偵察及復雜環境態勢感知等領域具有重要應用價值,將為相關行業技術升級注入新動力。

 2025-12-02
2025-12-02